由我院院长、智能汽车研究所所长陈虹教授牵头的“车辆安全运动智能预测控制技术”获评2024 年“中国汽车工程学会科学技术奖”技术发明奖特等奖。

汽车产业是国民经济重要支柱,发挥着工业经济稳增长的“压舱石”作用。安全是汽车工业发展的永恒主题,而汽车电控作为“三电”系统的核心技术,决定了车辆安全和智能化水平。在应对复杂道路和紧急避障等突发事件时,毫秒级运动控制是确保驾乘安全的终极防线。
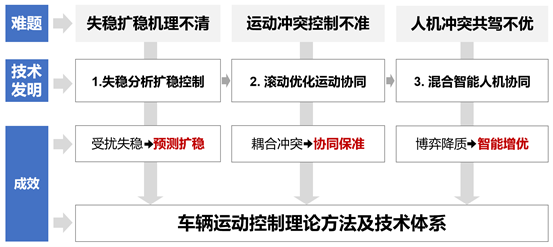
针对车辆运动控制系统面临的“失稳扩稳机理不清,运动冲突控制不准,人机冲突共驾不优”三大技术难题,本项目历经二十余年持续攻关,在基金委重大、国家重点研发项目等资助下,与中国第一汽车股份有限公司、东风汽车集团有限公司、吉林大学等持续深度合作,实现了侧向运动从“受扰失稳”到“预测扩稳”、运动域控从“耦合冲突”到“协同保准”、人机共驾从“博弈降质”到“智能增优”的理论与技术突破,实现了复杂环境下车辆运动的动态优化协调。研究成果已应用于13家整车及零部件企业,30余款车型研发与产业化。本项目不仅彰显了陈虹教授团队在车辆运动控制技术领域的创新精神和科研实力,也体现了多学科融合在技术突破中的重要推动作用。